Remix and Robo are new
composition and performance-based tools for robotics control.
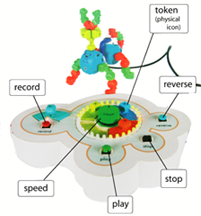
Remix is a tangible interface used to sample, organize
and manipulate gesturally-recorded robotic motions. Robo
is a modified game controller used to capture robotic motions,
adjust global motion parameters and execute motion recordings
in real-time.
We
apply an interaction model from the audio domain to the
robotic domain: the model Record, Sample, Sequence, and Perform is
used to compose robotic motion, rather than music. We
explore how this interaction model can make robotics
design more intuitive, playful and performative for children.
In our research, children use Remix and Robo for activities
that are both artistic (e.g. robotic puppet shows) and
athletic (e.g. robot competitions).
Our
objective is to provide new entry paths into robotics learning.
Whereas robotic design is typically rooted in engineering
paradigms, with Remix and Robo users pursue cooperative
and competitive social performances. Activities like character
design and robot competitions introduce a social context
that motivates learners to focus and reflect upon their
understanding of the robotic manipulative itself. |
|