Research
Topobo has been proven to playfully teach children ages 5-adult advanced physics, robotics, and computing concepts. Usually, kids don’t get to play with these ideas until they get to college.
Topobo is also shown to benefit children with autism and ASD.
Topobo was invented by Hayes Raffle, Amanda Parkes and Hiroshi Ishii at the MIT Media Lab.





Sculpting Behavior
A Constructive Assembly System With Kinetic Memory
H. Raffle's PhD Thesis from MIT Media Lab.

Topobo in the Wild
Longitudinal Evaluations of Educators Appropriating a Tangible Interface
ACM SIGCHI 2008
Peer-reviewed papers
CHI 2004 1 MB pdf.
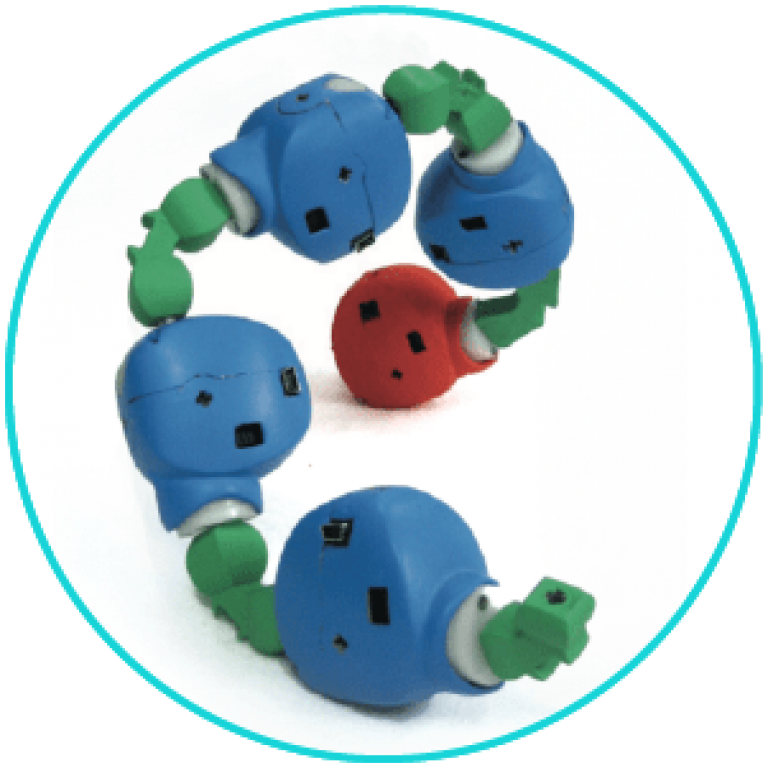
We introduce Topobo, a 3D constructive assembly system embedded with kinetic memory, the ability to record and playback physical motion. Unique among modeling systems is Topoboʼs coincident physical input and output behaviors. By snapping together a combination of Passive (static) and Active (motorized) components, people can quickly assemble dynamic biomorphic forms like animals and skeletons with Topobo, animate those forms by pushing, pulling, and twisting them, and observe the system repeatedly play back those motions. For example, a dog can be constructed and then taught to gesture and walk by twisting its body and legs. The dog will then repeat those movements and walk repeatedly.
Our evaluation of Topobo in classrooms with children ages 5-13 suggests that children develop affective relationships with Topobo creations and that their experimentation with Topobo allows them to learn about movement and animal locomotion through comparisons of their creations to their own bodies. Eighth grade science studentsʼ abilities to quickly develop various types of walking robots suggests that a tangible interface can support understanding how balance, leverage and gravity affect moving structures because the interface itself responds to the forces of nature that constrain such systems.
We analyze the collaborative benefits of a tangible interface for Autistic children. Topobo, a constructive assembly system with kinetic memory [12], was presented to children with Autism to see if more co-operative and collaborative play occurred when using Topobo compared to play with passive building blocks (LEGOs). This note presents the first quantitative study to address collaboration with Topobo, and results show that far more cooperative play occurred when autistic children used Topobo compared to passive blocks. Parallel and observational behaviour among users of Topobo was also noted.
What issues arise when designing and deploying tangibles for learning in long term evaluation? This paper reports on a series of studies in which the Topobo system, a 3D tangible construction kit with the ability to record and playback motion, was provided to educators and designers to use over extended periods of time in the context of their day-to-day work. Tangibles for learning – like all educational materials – must be evaluated in relation both to the student and the teacher, but most studies of tangibles for learning focus on the student as user. Here, we focus on the conception of the educator, and their use of the tangible interface in the absence of an inventor or HCI researcher. The results of this study identify design and pedagogical issues that arise in response to distribution of a tangible for learning in different educational environments.
(H. Raffle’s PhD Thesis) (2.5 MB pdf)
For over a century, educators and constructivist theorists have argued that children learn by actively forming and testing – constructing – theories about how the world works. Recent efforts in the design of “tangible user interfaces” (TUIs) for learning have sought to bring together interaction models like direct manipulation and pedagogical frameworks like constructivism to make new, often complex, ideas salient for young children. Tangible interfaces attempt to eliminate the distance between the computational and physical world by making behavior directly manipulable with one’s hands. In the past, systems for children to model behavior have been either intuitive-but-simple (e.g. curlybot) or complex-but-abstract, (e.g. LEGO Mindstorms). In order to develop a system that supports a user’s transition from intuitive-but-simple constructions to constructions that are complex-but-abstract, I draw upon constructivist educational theories, particularly Bruner’s theories of how learning progresses through enactive then iconic and then symbolic representations.
This thesis present an example system and set of design guidelines to create a class of tools that helps people transition from simple-but-intuitive exploration to abstract-andflexible exploration. The Topobo system is designed to facilitate mental transitions between different representations of ideas, and between different tools. A modular approach, with an inherent grammar, helps people make such transitions. With Topobo, children use enactive knowledge, e.g. knowing how to walk, as the intellectual basis to understand a scientific domain, e.g. engineering and robot locomotion. Queens, backpacks, Remix and Robo add various abstractions to the system, and extend the tangible interface. Children use Topobo to transition from hands-on knowledge to theories that can be tested and reformulated, employing a combination of enactive, iconic and symbolic representations of ideas.
CHI 2006 2.5 MB pdf
Digital Manipulatives embed computation in familiar children’s toys and provide means for children to design behavior. Some systems use “record and play” as a form of programming by demonstration that is intuitive and easy to learn. With others, children write symbolic programs with a GUI and download them into a toy, an approach that is conceptually extensible, but is inconsistent with the physicality of educational manipulatives. The challenge we address is to create a tangible interface that can retain the immediacy and emotional engagement of “record and play” and incorporate a mechanism for real time and direct modulation of behavior during program execution.
We introduce the Backpacks, modular physical components that children can incorporate into robotic creations to modulate frequency, amplitude, phase and orientation of motion recordings. Using Backpacks, children can investigate basic kinematic principles that underlie why their specifi c creations exhibit the specifi c behaviors they observe. We demonstrate that Backpacks make tangible some of the benefi ts of symbolic abstraction, and introduce sensors, feedback and behavior modulation to the record and play paradigm. Through our review of user studies with children ages 6-15, we argue that Backpacks extend the conceptual limits of record and play with an interface that is consistent with both the physicality of educational manipulatives and the local-global systems dynamics that are characteristic of complex robots.
SIGGRAPH 2006 250 kb pdf
Over the past twenty years, the types of toys that young children play with have undergone fundamental changes. While construction sets like blocks and LEGOs were once popular, now video games are the norm. Video games introduce elements of interactive, competitive, and dynamic play. These games often provide the player with a character on screen, allowing children a chance at performance, competition and expression not possible with constructive assembly toys. However, children can be more inventive with constructive assembly kits, creating their own physical objects that evoke a sense of ownership and pride.
Work in digital manipulatives [Resnick et al. 1998] and tangible interfaces [Ishii and Ullmer, 1997] has sought to turn children into designers of both physical form and digital behavior, leveraging the immediacy of physical modeling and the dynamics of embedded computer systems. While such systems can make complex ideas salient for children, most of them focus on engineering and design processes. Robo Topobo (Figure 1) introduces improvisational performance, typical of interactive systems like video games, as an approach to motivate children to engage in hands-on learning.
Interaction Design for Children 2007 500 kb pdf
We present Remix and Robo, new composition and performance based tools for robotics control. Remix is a tangible interface used to sample, organize and manipulate gesturally-recorded robotic motions. Robo is a modifi ed game controller used to capture robotic motions, adjust global motion parameters and execute motion recordings in real-time. Children use Remix and Robo to engage in (1) character design and (2) competitive endeavors with Topobo, a constructive assembly system with kinetic memory.
Our objective is to provide new entry paths into robotics learning. This paper overviews our design process and reports how users age 7–adult use Remix and Robo to engage in different kinds of performative activities. Whereas robotic design is typically rooted in engineering paradigms, with Remix and Robo users pursue cooperative and competitive social performances. Activities like character design and robot competitions introduce a social context that motivates learners to focus and refl ect upon their understanding of the robotic manipulative itself.
H. Raffle Master’s Thesis, MIT 2 MB pdf
We introduce Topobo, a 3-D constructive assembly system embedded with kinetic memory, the ability to record and playback physical motion. Unique among modeling systems is Topobo’s coincident physical input and output behaviors. By snapping together a combination of Passive (static) and Active (motorized) components, people can quickly assemble dynamic biomorphic forms like animals and skeletons, animate those forms by pushing, pulling, and twisting them, and observe the system repeatedly play back those motions. For example, a dog can be constructed and then taught to gesture and walk by twisting its body and legs. The dog will then repeat those movements and walk repeatedly.
Our evaluation of Topobo in classrooms with children ages 5- 13 suggests that children develop affective relationships with Topobo creations and that their experimentation with Topobo allows them to learn about movement and animal locomotion through comparisons of their creations to their own bodies. Eighth grade science students’ abilities to quickly develop various types of walking robots suggests that a tangible interface can support understanding how balance, leverage and gravity affect moving structures because the interface itself responds to the forces of nature that constrain such systems.
Download 2 MB pdf
We introduce topobo, a constructive assembly system invented to give children a tangible tool to physically simulate kinematic systems, and thus develop an intuition about how such systems behave. topobo is embedded with kinetic memory, the ability to record and playback physical motion. We discuss some of the system’s underlying concepts in the context of educational manipulative materials for young learners and overview brief interactions between children and topobo.
topobo is a new system in the class of computationally enhanced “Digital Manipulatives”[13], designed to allow children ages 5-10 to use direct manipulation to learn concepts that are currently considered “too advanced” for children their age. We believe that topobo can help children understand patterns and processes common to the fields of kinematics, modular robotics, system coordination, emergent dynamics (local vs. global behavior) and locomotion.